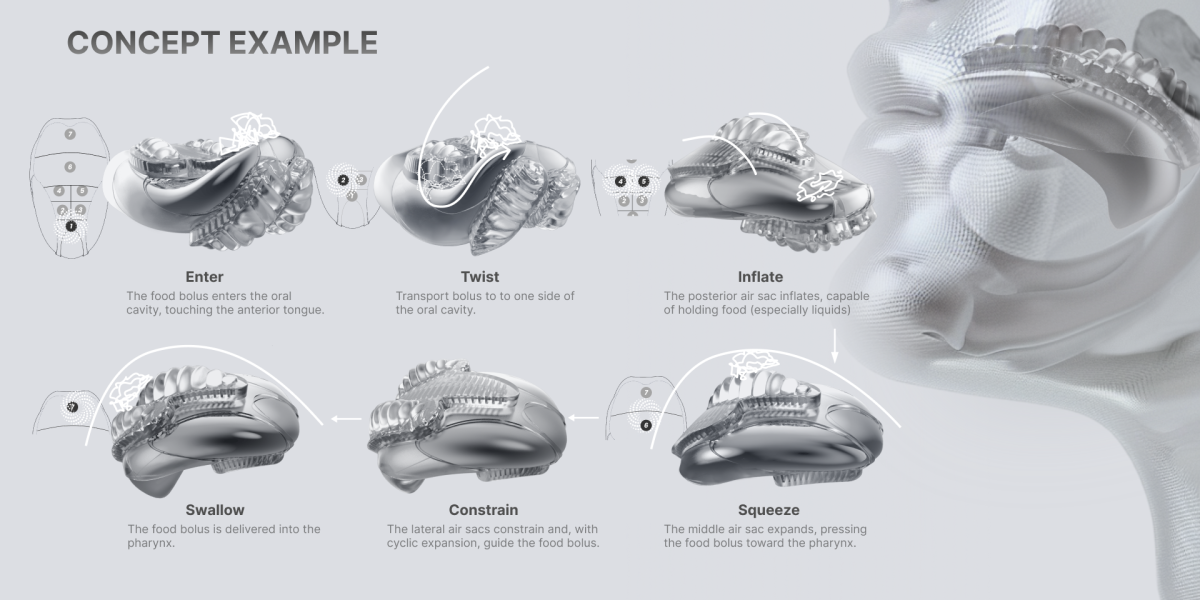
Orivane is a wearable device that assists swallowing. Using a multi-chamber pneumatic soft robotic system, air sacs mimic the tongue’s wave-like motion to address swallowing issues from weak tongue muscles. Beyond this, Orivane envisions a future where biomimetic technology extends human abilities.
Current Pain Points
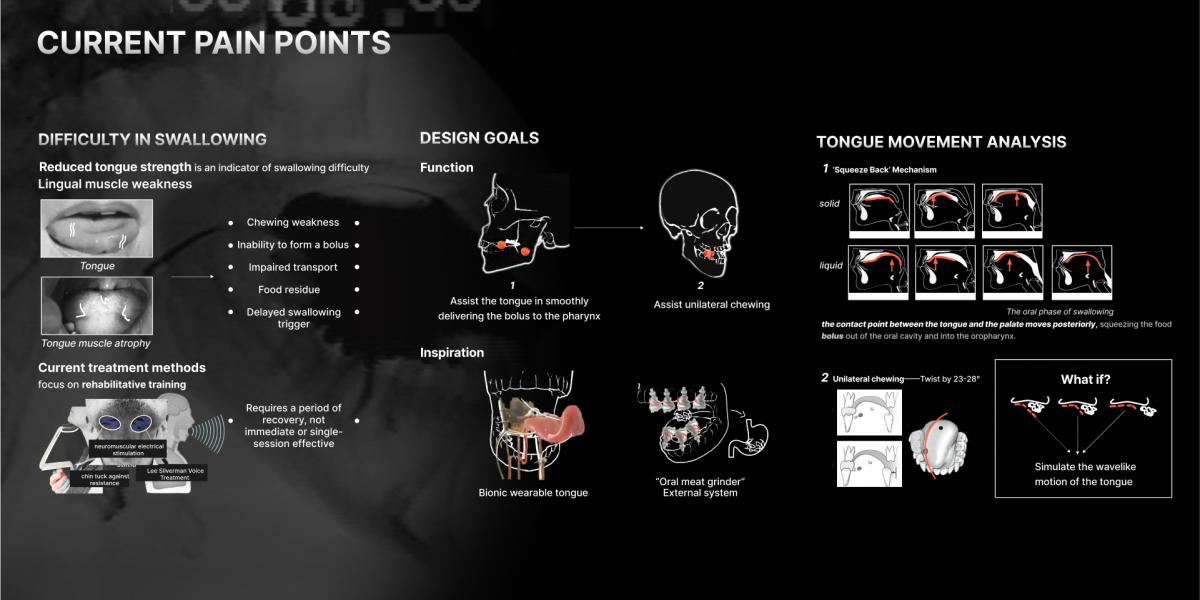
Reduced tongue strength is a key indicator of swallowing difficulty (lingual muscle weakness). At present, treatment for patients with dysphagia caused by weak tongue muscles primarily relies on methods such as neuromuscular electrical stimulation, chin tuck against resistance, and the Lee Silverman Voice Treatment. These approaches typically require long-term rehabilitation and continuous training in order to gradually improve swallowing function.
However, during the rehabilitation process, patients often lack solutions that provide immediate assistance in daily eating. Orivane is an innovative response to this gap, offering support specifically for lingual muscle weakness. It aims to assist patients in completing swallowing more smoothly and safely while they undergo rehabilitation, thereby establishing a new balance between therapy and everyday life.
Working Principle
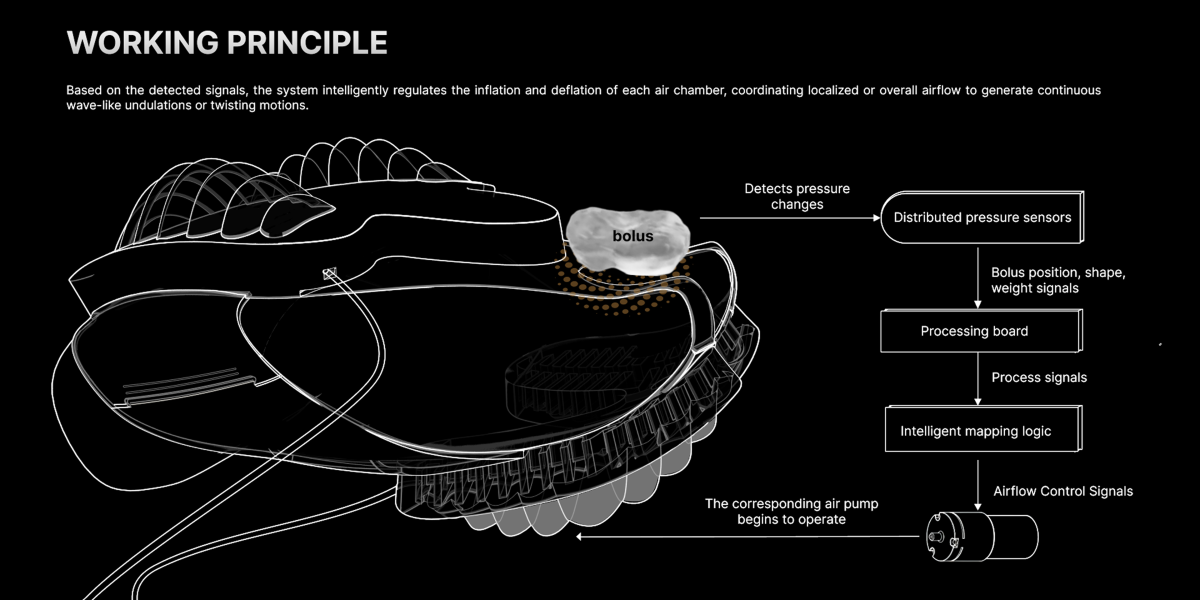
Orivane integrates distributed pressure sensors that detect the shape, weight, and position of food within the oral cavity. After the processing board analyzes the sensed signals, the intelligent mapping logic sends airflow control signals and dynamically adjusts the inflation and deflation of each air pump. This enables coordinated local or global air sac actuation, generating continuous wave-like undulations or twisting motions that simulate the natural dynamic pushing process of the tongue.
Design Process
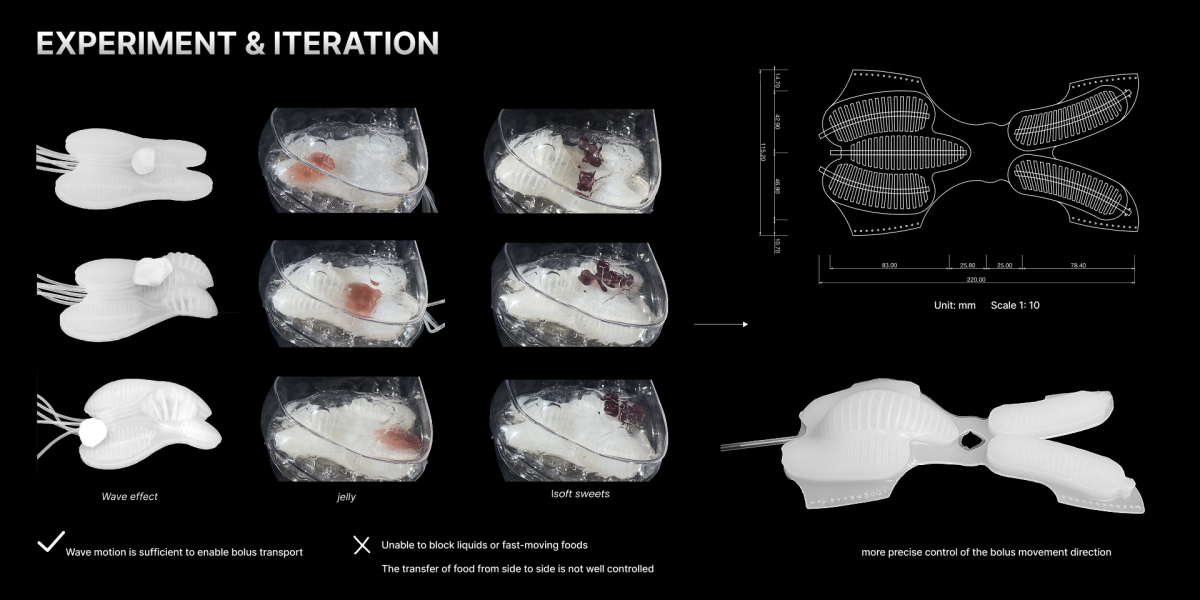
Initially, the airbag arrangement adopted a single-sided “X”-shaped design. This layout enabled the basic movement of pushing the food bolus from the front to the back of the oral cavity. However, this design had certain limitations: it was difficult to precisely control the lateral movement of the bolus, it could not block the flow of liquid food, and the motion pattern of the airbags was relatively monotonous, only capable of pushing food forward in a wave-like manner, making it hard to adapt to the diverse shape changes of the tongue within the oral cavity.
To address this, we added airbags beneath the tongue and adopted a bilateral envelopment design, allowing the tongue to perform an inward curling motion, thereby better wrapping and propelling food as it enters the oral cavity. In addition, we found that by designing airbag chambers at multiple angles (e.g., 90° + 75°), it is possible to achieve a twisting motion of the airbags. Therefore, in the arrangement of the lower airbags, we incorporated chambers with two different angles, in order to more precisely control the lateral movement of the bolus within the oral cavity.